




















JP2023052783A
审中
具有手指抓握的用户界面设备
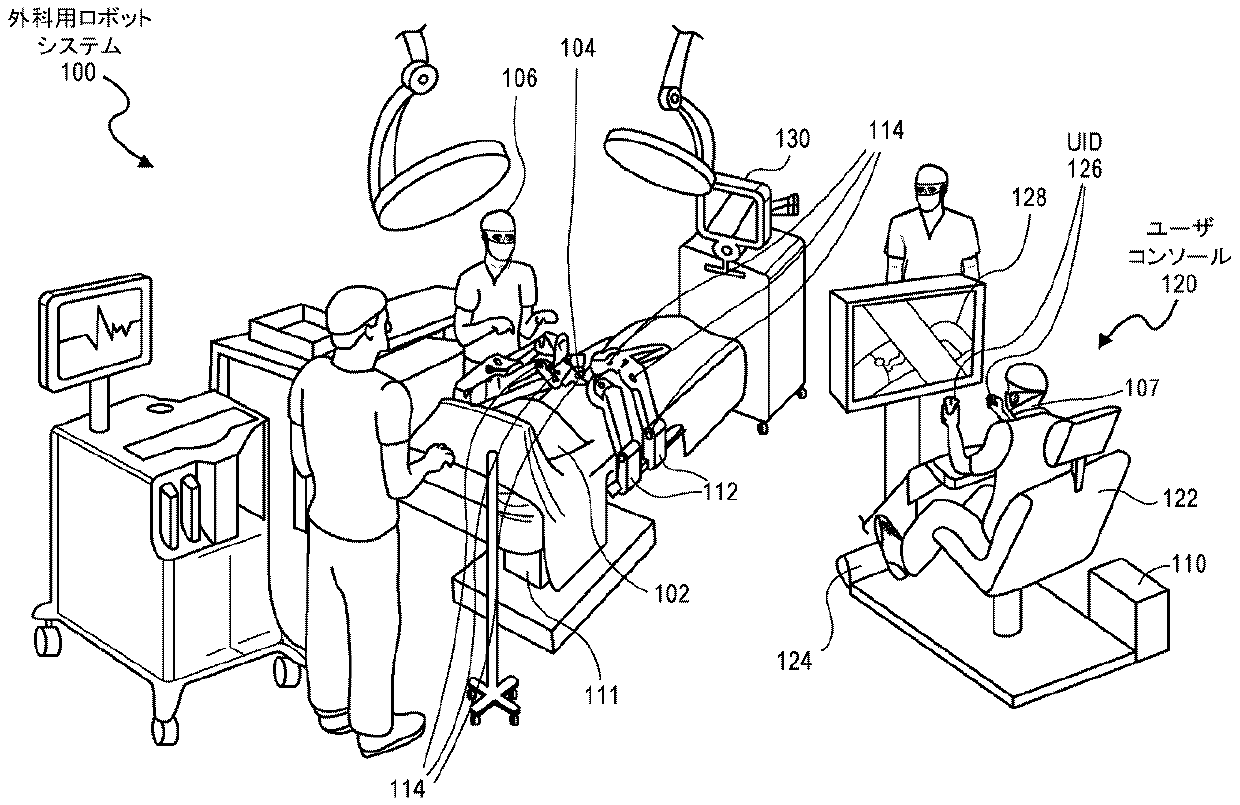
描述了一种用于在手术机器人系统内操纵机器人手术工具的用户界面装置。
用户界面设备可包括设备外壳,该设备外壳具有围绕中心轴对称设置的抓握表面。 抓握表面可包括绕中心轴线旋转的表面。 跟踪传感器可以安装在设备外壳内以响应于设备外壳的移动而生成空间状态信号。 空间状态信号可用于控制机器人系统执行器的运动。 手指握把可以设置在设备外壳的边缘并且可以响应于用户的触摸而产生抓握信号。 抓握信号可用于暂停机器人系统致动器的运动。 描述并要求保护其他实施例。
More
 Images(16)
Images(16)
| 专利时间轴 | |
|
|
| 专利类型/受理局 | APPLICATION( JP) |
| [标]当前申请(专利权)人 | バーブ サージカル インコーポレイテッド,VERB SURGICAL INC. |
| 当前申请(专利权)人 |
バーブ サージカル インコーポレイテッド,VERB SURGICAL INC. アメリカ合衆国 カリフォルニア州 95054 サンタ クララ グレート アメリカ パークウェイ 5490, |
| [标]原始申请(专利权)人 | バーブ サージカル インコーポレイテッド,VERB SURGICAL INC. |
| 原始申请(专利权)人 | バーブ サージカル インコーポレイテッド,VERB SURGICAL INC. アメリカ合衆国 カリフォルニア州 95054 サンタ クララ グレート アメリカ パークウェイ 5490, |
| IPC分类号 |
IPC(8):
A61B34/20B25J13/02
+2
|
| 技术主题分类 | |
| 应用领域分类 | |
| 发明人 |
サヴァル ジョアン (アメリカ合衆国 カリフォルニア州 94306 パロ アルト キプリング ストリート 2814) レンタ シュム アレグラ アンナ (アメリカ合衆国 カリフォルニア州 94110 サンフランシスコ フロリダ ストリート 1145) |

