




















JP2023050329A
审中
机器人运动系统
提供了一种机器人移动系统,其沿着诸如建筑物的外部的竖直平面移动。
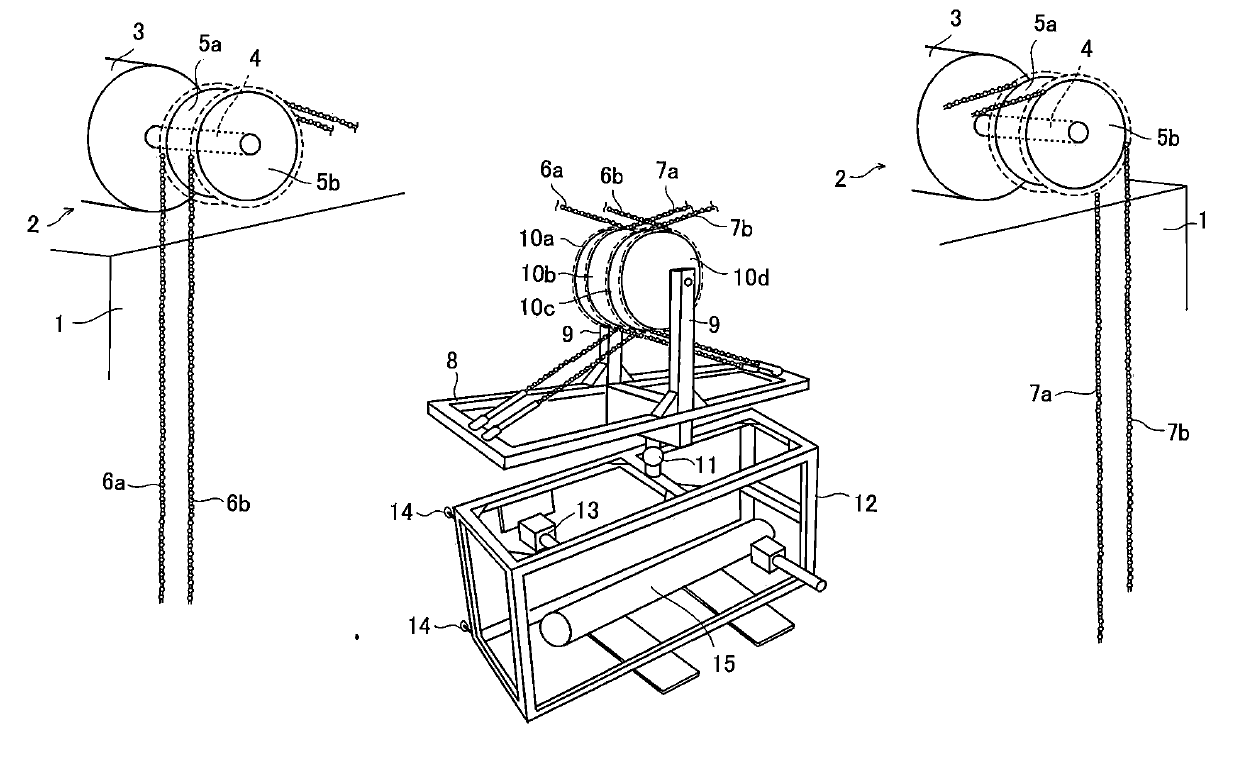
解:在机器人本体12的可移动范围内,机器人本体12的位置和左右各送料绕线装置2送出的链条6a(6b)、7a(7b)的长度是唯一确定的。有 因此,例如,通过在控制器上显示机器人主体12的可动范围并用指尖指定所显示的可动范围的期望位置等,可以知道左右链条的长度,从而3、传送预定伸出长度的转数,远程控制机器人本体12的运动。 当机器人移动到接近可移动范围极限的点时,左右链条在支架8上的作用点不同,使支架8在竖直平面内倾斜。因此,机器人主体12即使支撑件8倾斜也保持水平状态。
More
 Images(5)
Images(5)
| 专利时间轴 | |
|
|
| 专利类型/受理局 | APPLICATION( JP) |
| [标]当前申请(专利权)人 | ダブル技研株式会社 |
| 当前申请(专利权)人 |
ダブル技研株式会社 神奈川県座間市栗原920-7 |
| [标]原始申请(专利权)人 | ダブル技研株式会社 |
| 原始申请(专利权)人 | ダブル技研株式会社 神奈川県座間市栗原920-7 |
| IPC分类号 |
IPC(8):
B25J5/00
+1
|
| 技术主题分类 | |
| 应用领域分类 | |
| 发明人 |
和田 博 (神奈川県座間市栗原920-7 ダブル技研株式会社内) |

