




















CN115922704A
审中
机器人和外部轴的联动协同控制方法、设备及存储介质
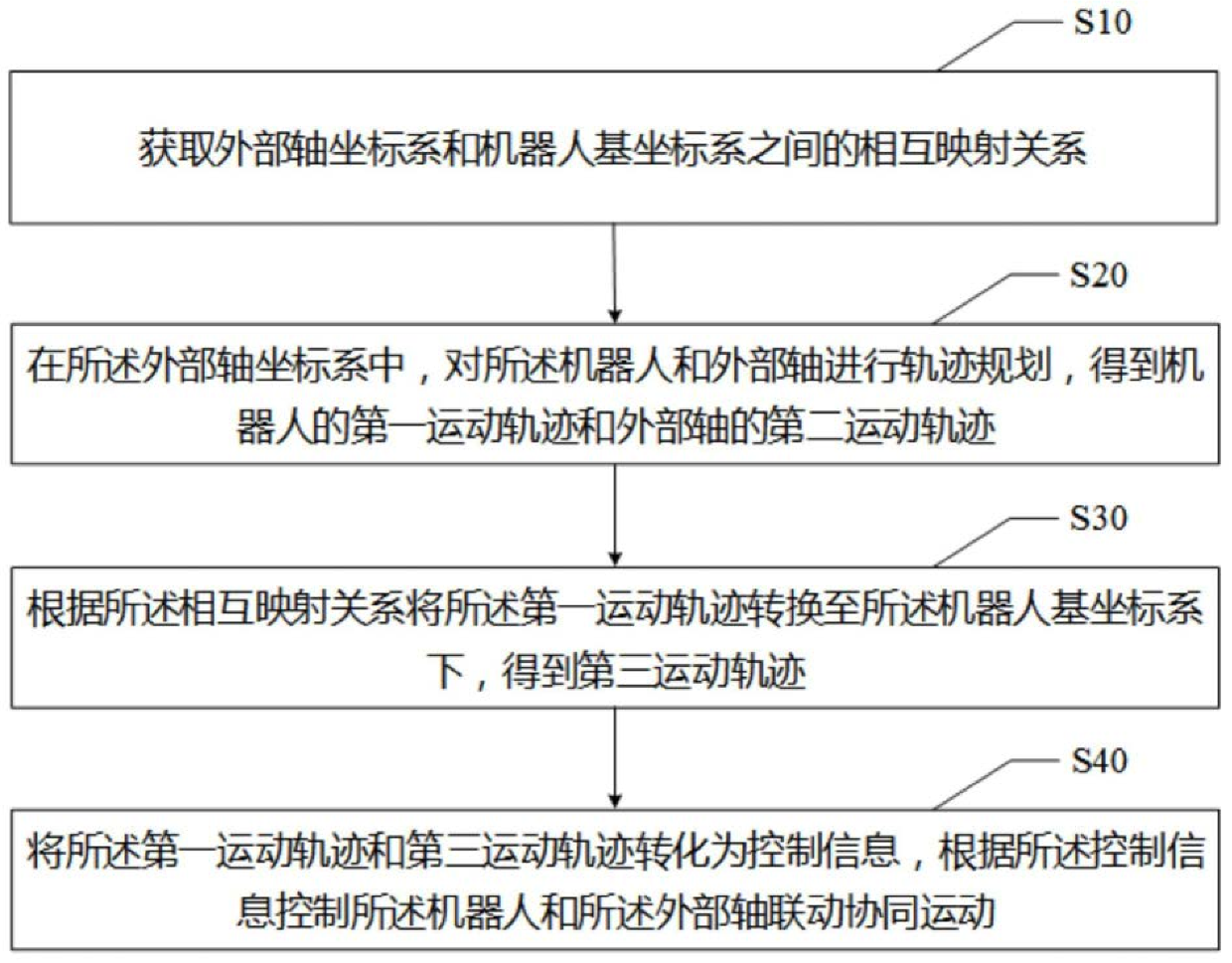
本申请公开了一种机器人和外部轴的联动协同控制方法、设备及存储介质,该方法包括:获取外部轴坐标系和机器人基坐标系之间的相互映射关系;在所述外部轴坐标系中,对所述机器人和外部轴进行轨迹规划,得到机器人的第一运动轨迹和外部轴的第二运动轨迹;根据所述相互映射关系将所述第一运动轨迹转换至所述机器人基坐标系下,得到第三运动轨迹;将所述第一运动轨迹和第三运动轨迹转化为控制信息,根据所述控制信息控制所述机器人和所述外部轴联动协同运动。本申请通过构建相互映射关系进行外部轴坐标系和机器人基坐标系之间的转换,实现了提高机器人外部轴配合效率的技术效果。
More
 Images(8)
Images(8)
| 专利时间轴 | |
|
|
| 专利类型/受理局 | APPLICATION( CN) |
| [标]当前申请(专利权)人 | 深圳市汇川技术股份有限公司 |
| 当前申请(专利权)人 |
深圳市汇川技术股份有限公司 518000 广东省深圳市龙华新区观澜街道高新技术产业园汇川技术总部大厦 |
| [标]原始申请(专利权)人 | 深圳市汇川技术股份有限公司 |
| 原始申请(专利权)人 | 深圳市汇川技术股份有限公司 518000 广东省深圳市龙华新区观澜街道高新技术产业园汇川技术总部大厦 |
| IPC分类号 |
IPC(8):
B25J9/16
+1
|
| 技术主题分类 | |
| 应用领域分类 | |
| 发明人 |
高得胜 许长华 凌冠耀 |
| 代理机构 |
深圳市世纪恒程知识产权代理事务所 (单家健) |

